
Op deze pagina leg ik uit wat de elektronica onderdelen zijn die ik voor het maken van een elektrisch LEGO wissel nodig heb.
De volgende onderdelen zijn beschreven:
- Breadboard met voeding, 12V voeding en jumper wires
- ESP32
- Servomotor SG90 en MG90
- Stappenmotor
- LED (Light Emitting Diode)
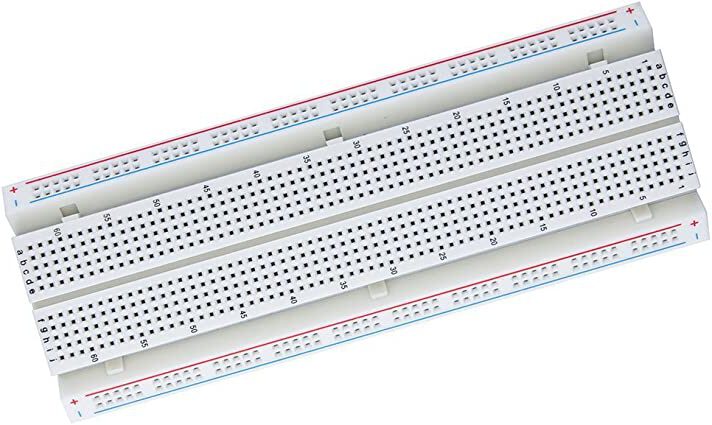
Breadboard
Het breadboard (of steekbord) is een bordje met gaatjes waarin je de elektronica onderdelen kunt prikken. Je kunt er zonder solderen elektrische schakeling op bouwen. Ik heb per ongeluk de 400 gaats besteld maar die is te klein voor de ESP32, Breadboard voeding én drukknoppen. Zorg dus dat je de 830 gaats besteld.
Lees hier meer over breadboard en experimenteerprint.
Breadboard voeding
De onderdelen op het breadboard hebben een voedingsspanning nodig. Deze voeding maakt een gestabiliseerde spanning van 3,3 en 5 volt. De voeding is nodig om je schakeling op het breadboard te laten werken.
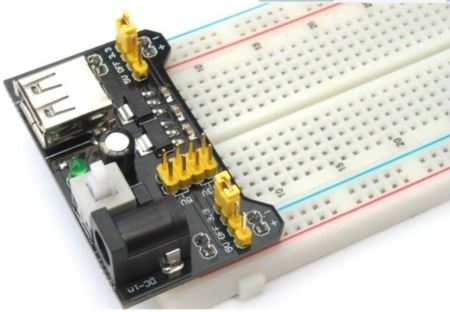
Doormiddel van de gele jumper caps op de MB102 kun je kiezen of je 3,3V of 5V wilt hebben. Dit kun je per lijn kiezen. Je kunt ook één lijn op 3,3V en één lijn op 5V zetten. Het is ook mogelijk om de voedingslijnen uit te schakelen. Per lijn gaat dat via de jumper cap, als je het hele Breadboard wilt uitschakelen gebruik je de aan/uit knop.
Om de MB102 te voeden heb je een 6,5V – 12V voeding met DC-Jack 2.1mm x 5.5mm nodig.
Aan de bovenkant zit een LED die aangeeft of de MB102 aan staat. Ook zit er een USB poort op. Let op! Dit is alleen een output.
12V voeding
De 12V Voeding Adapter heb je nodig nadat de microprocessor ESP32 is geprogrammeerd. De voeding sluit je aan op de breadboard voeding 3,3-5V. Let op dat de voeding een DC plug 5,5 x 2,1mm heeft.


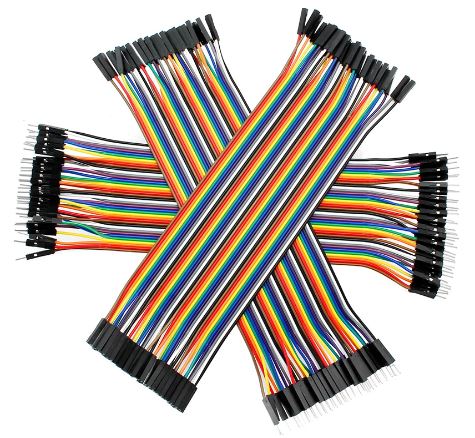
Jumper wires
Jumper wires zijn draden die aan elke uiteinde een connector pin hebben. Je gebruikt ze om twee dingen op het breadboard met elkaar te verbinden.
Er zijn 3 verschillende soorten:
- F/F – Female / Female. Deze heeft aan beide kant een connector waar een pin in kan.
- M/M – Male / Male. Deze heeft aan beide kant een connector met een pin. Deze kan je bijvoorbeeld in het breadboard steken.
- F/M – Female / Male. Deze heeft aan een kant een connector waar een pin in kan en aan een kant een connector met een pin.
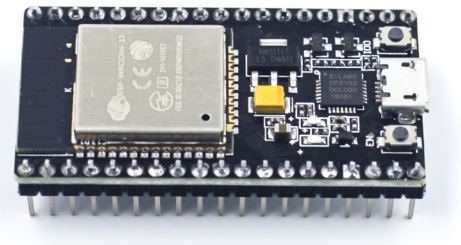
ESP32
De ESP32 is een onderdeel dat je kunt programmeren, een microcontroller. Via je laptop laad (upload) je een programma in de ESP32. In het programma staan de opdrachten die je de ESP32 wilt laten uitvoeren.
De ESP32 is krachtig, goedkoop en heeft geïntegreerde Wi-Fi en dual-mode bluetooth.
Servomotor
Een servomotor bestaat uit een elektromotortje, een daaraan gekoppelde potentiometer (regelbare weerstand) en regelelektronica. De servo heeft standaard een voedingsspanning van 5 volt en een stuursignaal met een herhalingsfrequentie (nominaal 50 Hz en een pulsduur van 0,5 tot 2 milliseconden). De pulsduur bepaalt de rotatiestand. De meeste servo’s hebben een beperkte draaihoek; maximaal 180 graden.
360 graden-servo’s hebben Bidirectionele DC-motoren en kunnen als aandrijving worden gebruikt. Het stuursignaal wordt omgezet in een draairichting en kracht of snelheid. Het zijn dus geen rotatie-positie-servo’s.
Servo SG90 Micro servo 180°
De TowerPro SG90 micro servo motor is een van de meest populaire servo motoren op de markt. Dit type heeft een torque van wel 1,56kg/cm, dit is ruim voldoende om sensoren te bewegen. Het is zelfs geschikt voor kleine motortjes of RC vliegtuigen. De SG90 servo motor komt met een 3-pin stroom en besturingskabel en bevestigingsmateriaal.

Servo MG90S metal gear 180°
De MG90S is een kleine micro-servo. Het biedt relatief veel kracht voor zijn formaat. De servo beschikt over volledig metalen tandwielen waardoor deze niet snel zal verslijten. De MG90S kan ca 180° (graden) draaien. Dit is voldoende voor toepassingen zoals kleine robots, RC vliegtuigen, helicopters of boten. De MG90S wordt geleverd met een schroefjes en servo armen.

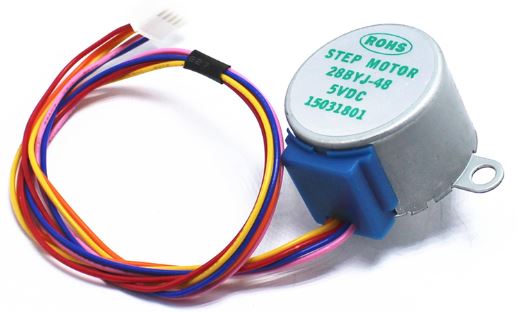
Stappenmotor
Een stappenmotor kun je heel precies laten draaien en op een specifiek punt laten stoppen. Door de motor meerdere pulsen in een bepaalde volgorde te geven gaat de motoras draaien, hoe sneller de pulsen komen des te sneller de motor zal draaien.
De belangrijkste eigenschap van een stappenmotor is het koppel dat hij kan leveren. De motor kan dit ook leveren als hij stilstaat en kan daarom als standrem fungeren.
Stappenmotor driver
De stappen motor driver zorgt voor een directe interface tussen een stappenmotor en de ESP microcontroller.

LED (Light Emitting Diode)
Een LED is een lichtgevende diode en werkt dus maar 1 kant op. Draai je de ‘+’ en ‘-‘ aansluiting om dan spert de LED en doet deze het niet.
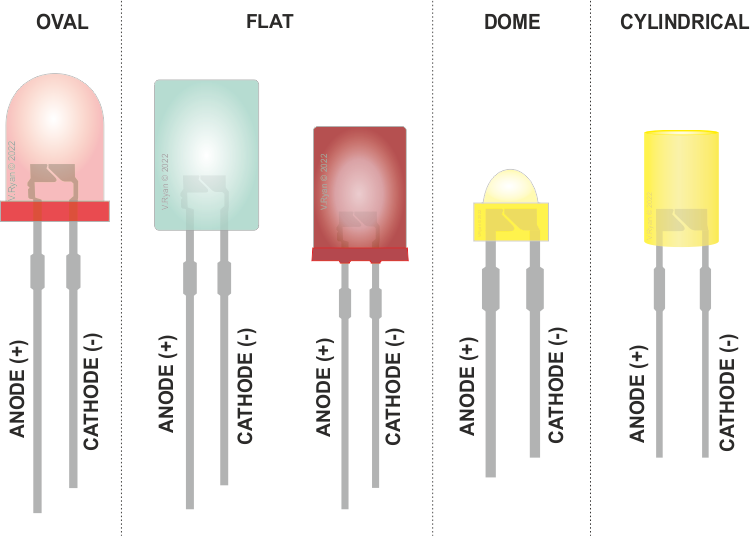
De pootjes van de LED hebben meestal verschillende lengtes. De langere poot is de anode (positief), terwijl de kortere de kathode (negatief) is. De platte rand of inkeping aan de LED wijst meestal naar de locatie van de kathode.
Verkeerd aansluiten kan de LED’s beschadigen.
Lees LEDS for beginners (By noahw op Instructabels.com)…
Serie- of parallelschakeling?
De spanning voor een LED verschilt per kleur.
Lees LED calculator van Budget Tronic…
De weerstand kan in serie (dat wil zeggen in lijn) met de LED worden geplaatst op 1 poot van de LED. Het maakt niet uit welke poot. Als de stroom in het circuit al laag genoeg is om schade aan de LED te voorkomen, dan is een weerstand helemaal niet nodig.
In serie geschakeld kun je meerdere LED’s op één weerstand aansluiten. Maar parallel geschakeld, heb je één weerstand nodig voor elke LED.
Of je kunt LED’s in serie geschakeld aan één weerstand aansluiten en die strings parallel aansluiten.
De reden: de hoeveelheid licht van de LED is evenredig met de stroom die erdoorheen gaat.
Welke weerstand gebruiken?
Ik heb aan Willem de volgende vraag gesteld:
Kun je 3 LEDs parallel op één weerstand van 0,25 watt schakelen? Of wordt de weerstand dan te warm?
De eerste vraag is hoe fel wil je de led laten branden. Als het fel is dan zal de LED de maximale stroom gebruiken, dat is 20mA. Minder fel is ongeveer 5mA.
Stel dat je een voedingsspanning van 5V gebruikt.
Bij 3 LEDs is dit dan 3 x 20 = 60 mA. Over de LEDs valt 2V dan valt over de weerstand 3V. Dus de weerstandwaarde moet dan 3V/0.06 = 50 ohm zijn.Vermogen van weerstand is U x I : dus 3 x 0,06 = 0,180 W ofwel 180mW.
Dus met een 50 ohm weerstand van 250mW moet dat makkelijk kunnen.
Maar je kunt ook 3 LEDs in serie zetten en aansluiten op 5V, dan heb je geen weerstand nodig.
Zelf gebruik ik voor het kerstdrop een weerstand van 150 (groen-groen-zwart) of 220 (rood-rood-zwart).